
Page 30 - Read Online
P. 30
Page 12 of 26 Blewitt et al. Soft Sci 2024;4:13 https://dx.doi.org/10.20517/ss.2023.49
Figure 10. Diagram of longitudinal and latitudinal stress on a thin-walled cylinder.
[46]
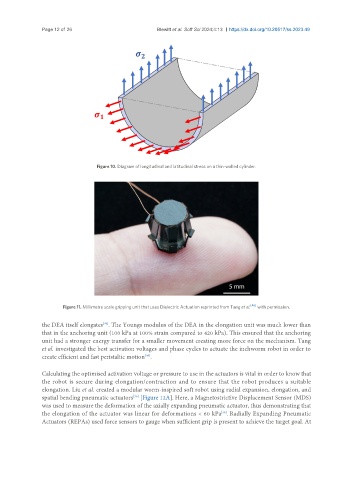
Figure 11. Millimetre scale gripping unit that uses Dielectric Actuation reprinted from Tang et al. with permission.
the DEA itself elongates . The Youngs modulus of the DEA in the elongation unit was much lower than
[46]
that in the anchoring unit (100 kPa at 100% strain compared to 420 kPa). This ensured that the anchoring
unit had a stronger energy transfer for a smaller movement creating more force on the mechanism. Tang
et al. investigated the best activation voltages and phase cycles to actuate the inchworm robot in order to
[46]
create efficient and fast peristaltic motion .
Calculating the optimised activation voltage or pressure to use in the actuators is vital in order to know that
the robot is secure during elongation/contraction and to ensure that the robot produces a suitable
elongation. Liu et al. created a modular worm-inspired soft robot using radial expansion, elongation, and
[36]
spatial bending pneumatic actuators [Figure 12A]. Here, a Magnetostrictive Displacement Sensor (MDS)
was used to measure the deformation of the axially expanding pneumatic actuator, thus demonstrating that
[36]
the elongation of the actuator was linear for deformations < 60 kPa . Radially Expanding Pneumatic
Actuators (REPAs) used force sensors to gauge when sufficient grip is present to achieve the target goal. At