
Page 19 - Read Online
P. 19
Page 8 of 12 Jan et al. Soft Sci 2024;4:10 https://dx.doi.org/10.20517/ss.2023.54
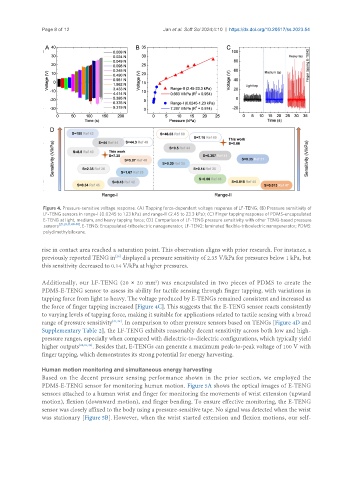
Figure 4. Pressure-sensitive voltage response. (A) Tapping force-dependent voltage response of LF-TENG; (B) Pressure sensitivity of
LF-TENG sensors in range-I (0.0245 to 1.23 kPa) and range-II (2.45 to 23.3 kPa); (C) Finger tapping response of PDMS-encapsulated
E-TENG at light, medium, and heavy tapping force; (D) Comparison of LF-TENG pressure sensitivity with other TENG-based pressure
sensors [25,26,31,40-50] . E-TENG: Encapsulated-triboelectric nanogenerator; LF-TENG: laminated flexible-triboelectric nanogenerator; PDMS:
polydimethylsiloxane.
rise in contact area reached a saturation point. This observation aligns with prior research. For instance, a
previously reported TENG in displayed a pressure sensitivity of 2.35 V/kPa for pressures below 1 kPa, but
[26]
this sensitivity decreased to 0.14 V/kPa at higher pressures.
Additionally, our LF-TENG (20 × 20 mm ) was encapsulated in two pieces of PDMS to create the
2
PDMS-E-TENG sensor to assess its ability for tactile sensing through finger tapping, with variations in
tapping force from light to heavy. The voltage produced by E-TENGs remained consistent and increased as
the force of finger tapping increased [Figure 4C]. This suggests that the E-TENG sensor reacts consistently
to varying levels of tapping force, making it suitable for applications related to tactile sensing with a broad
range of pressure sensitivity [41,42] . In comparison to other pressure sensors based on TENGs [Figure 4D and
Supplementary Table 2], the LF-TENG exhibits reasonably decent sensitivity across both low and high-
pressure ranges, especially when compared with dielectric-to-dielectric configurations, which typically yield
higher outputs [25,31,42] . Besides that, E-TENGs can generate a maximum peak-to-peak voltage of 100 V with
finger tapping, which demonstrates its strong potential for energy harvesting.
Human motion monitoring and simultaneous energy harvesting
Based on the decent pressure sensing performance shown in the prior section, we employed the
PDMS-E-TENG sensor for monitoring human motion. Figure 5A shows the optical images of E-TENG
sensors attached to a human wrist and finger for monitoring the movements of wrist extension (upward
motion), flexion (downward motion), and finger bending. To ensure effective monitoring, the E-TENG
sensor was closely affixed to the body using a pressure-sensitive tape. No signal was detected when the wrist
was stationary [Figure 5B]. However, when the wrist started extension and flexion motions, our self-