
Page 110 - Read Online
P. 110
Songthumjitti et al. Intell Robot 2023;3(3):306-36 I http://dx.doi.org/10.20517/ir.2023.20 Page 7 of 31
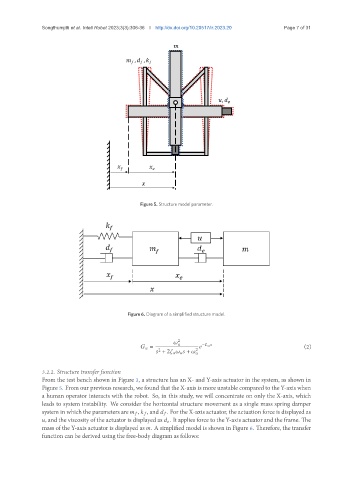
Figure 5. Structure model parameter.
Figure 6. Diagram of a simplified structure model.
2
= − (2)
2 2
+ 2 +
3.2.2. Structure transfer function
From the test bench shown in Figure 3, a structure has an X- and Y-axis actuator in the system, as shown in
Figure 5. From our previous research, we found that the X-axis is more unstable compared to the Y-axis when
a human operator interacts with the robot. So, in this study, we will concentrate on only the X-axis, which
leads to system instability. We consider the horizontal structure movement as a single mass spring damper
system in which the parameters are , , and . For the X-axis actuator, the actuation force is displayed as
, and the viscosity of the actuator is displayed as . It applies force to the Y-axis actuator and the frame. The
mass of the Y-axis actuator is displayed as . A simplified model is shown in Figure 6. Therefore, the transfer
function can be derived using the free-body diagram as follows: