
Page 37 - Read Online
P. 37
Blewitt et al. Soft Sci 2024;4:13 https://dx.doi.org/10.20517/ss.2023.49 Page 19 of 26
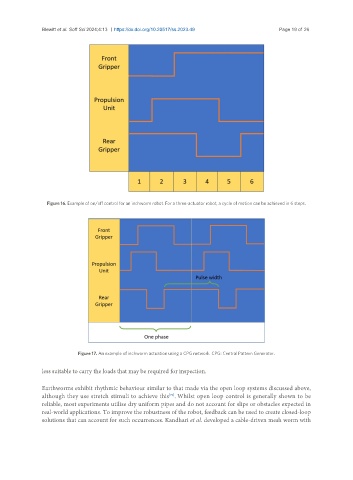
Figure 16. Example of on/off control for an inchworm robot. For a three-actuator robot, a cycle of motion can be achieved in 6 steps.
Figure 17. An example of inchworm actuation using a CPG network. CPG: Central Pattern Generator.
less suitable to carry the loads that may be required for inspection.
Earthworms exhibit rhythmic behaviour similar to that made via the open loop systems discussed above,
although they use stretch stimuli to achieve this . Whilst open loop control is generally shown to be
[72]
reliable, most experiments utilise dry uniform pipes and do not account for slips or obstacles expected in
real-world applications. To improve the robustness of the robot, feedback can be used to create closed-loop
solutions that can account for such occurrences. Kandhari et al. developed a cable-driven mesh worm with