
Page 7 - Read Online
P. 7
Jin et al. Soft Sci 2023;3:8 https://dx.doi.org/10.20517/ss.2022.34 Page 5 of 26
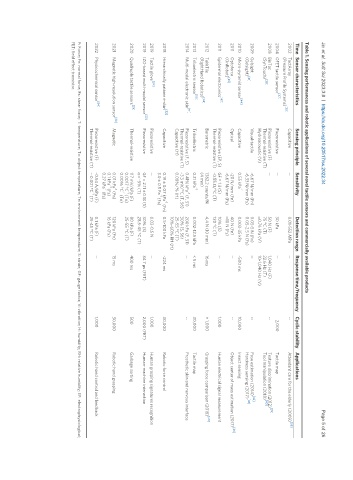
Table 1. Sensing performances and robotic applications of several novel tactile sensors and commercially available products
Time Sensor characteristics Sensing principle Sensitivity Detection range Response time/frequency Cyclic stability Applications
2002 TactArray Capacitive -- 0.01-552 MPa -- -- Attendant care for the elderly (2009) [36]
[35]
(Pressure Profile Systems)
[37]
2004 OFET tactile sensor Piezoresistive -- 30 kPa -- 2,000 Tactile map
[39]
2008 BioTac Piezoresistive (F) -- 50 N (F) 1,040 Hz (F) -- Texture discrimination (2012)
[38] [40]
(SynTouch) Thermal-resistive (T) 75 °C (T) 22.6 Hz (T) Tool manipulation (2018)
Hydroacoustic (V) ±0.76 kPa (V) 10-1,040 Hz (V)
[42]
2009 Gelsight Visual-tactile ~6.67 N/mm (Fn) 0.05-5 N (Fn) -- -- Pose estimation (2014)
(Gelsight) [41] ~6.33 N/mm (Fs) 0.05-2.5 N (Fs) Hardness sensing (2017) [43]
[44] -1
2010 Micro-pyramid sensor Capacitive 0.55 kPa 0.003-35 kPa ~500 ms 10,000 Insect sensing
2011 Optoforce Optical ~20 N/mm (Fn) 40 N (Fn) -- -- Object center of mass estimation (2017) [46]
[45]
(OnRobot) ~6.67 N/mm (Fs) ±10 N (Fs)
[47]
2011 Epidermal electronics Piezoresistive (EP, S) GF = 1.3 (S) 10% (S) -- 1,000 Human electrical signal measurement
Thermal-resistive (T) ~0.55 Ω/°C (T) 120 °C (T)
[49]
2012 TakkTile Barometric 1382.2 counts/N 4.4 N (10 mm) 16 ms > 1,000 Grasping force comparison (2018)
(RightHand Robotics) [48] (4 mm)
[50] -1
2013 Triboelectric sensor Triboelectric 0.31 kPa 0.002-12.5 kPa < 5 ms 30,000 Tactile map
-1
2014 Multi-modal electronic skin [51] Piezoresistive (F, S) 0.41% kPa (F, S1) 200 kPa (F, S1) -- -- Prosthetic skin and nervous interface
Thermal-resistive (T) ~3.3 mV/°C (T, S6) 30% (S, S6)
Capacitive (H) 0.08%/% (H) 25-55 °C (T)
10%-60% RH (H)
[52] -1
2018 Hierarchically pattern e-skin Capacitive 0.19 ± 0.07 kPa (Fn) 0.5-100 kPa ~224 ms 30,000 Robotic force control
-1
3.0 ± 0.5 Pa (Fs)
[34]
2019 Tactile glove Piezoresistive -- 0.03-0.5 N -- 1,000 Human grasping signatures recognition
[53]
2019 IZO-based multi-modal sensor Piezoresistive GF = 2.11 ± 0.13 (S) 30% (S) 34.7 μs (FET) 2,000 (FET) Human-machine interaction
α ≈ -5% (T) 28.5-45 °C (T)
[29]
2020 Quadruple tactile sensors Thermal-resistive 117 mV/kPa (F) 80 kPa (F) 400 ms 500 Garbage sorting
-1
0.0017 °C (To) 25-55 °C (T)
-1
0.0016 °C (Te)
-1
2021 Magnetic high-resolution sensor [30] Magnetic 0.01 kPa (Fn) 120 kPa (Fn) 15 ms 30,000 Robotic hand grasping
-1
0.1 kPa (Fs) 16 kPa (Fs)
-1
0.27 kPa (Fs)
2022 Physicochemical sensor [54] Piezoresistive (F) ~0.54 A/kPa (F) 0.1 kPa (F) -- 1,000 Robotic hand control and feedback
-1
Thermal-resistive (T) ~-0.001 °C (T) 25-45 °C (T)
F: Force; Fn: normal force; Fs: shear force; T: temperature; To: object temperature; Te: environment temperature; S: strain; GF: gauge factor; V: vibration; H: humidity; RH: relative humidity; EP: electrophysiological;
FET: field effect transistor.