
Page 108 - Read Online
P. 108
Mai et al. Intell Robot 2023;3(4):466-84 I http://dx.doi.org/10.20517/ir.2023.37 Page 15 of 19
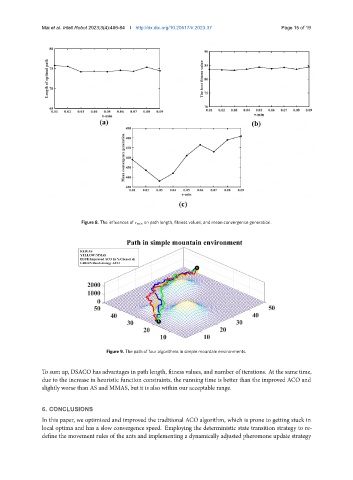
Figure 8. The influences of on path length, fitness values, and mean convergence generation.
Figure 9. The path of four algorithms in simple mountain environments.
To sum up, DSACO has advantages in path length, fitness values, and number of iterations. At the same time,
due to the increase in heuristic function constraints, the running time is better than the improved ACO and
slightly worse than AS and MMAS, but it is also within our acceptable range.
6. CONCLUSIONS
In this paper, we optimized and improved the traditional ACO algorithm, which is prone to getting stuck in
local optima and has a slow convergence speed. Employing the deterministic state transition strategy to re-
define the movement rules of the ants and implementing a dynamically adjusted pheromone update strategy