
Page 131 - Read Online
P. 131
Page 28 of 31 Songthumjitti et al. Intell Robot 2023;3(3):306-36 I http://dx.doi.org/10.20517/ir.2023.20
Figure 35. Stability region boundary comparison between a non-compensated system, a feed-forward system, and a feedback system at
120% .
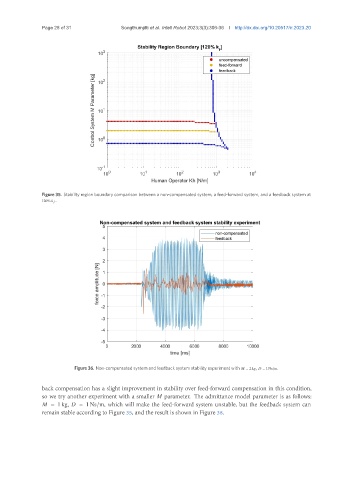
Figure 36. Non-compensated system and feedback system stability experiment with = 2 kg, = 1 Ns/m.
back compensation has a slight improvement in stability over feed-forward compensation in this condition,
so we try another experiment with a smaller parameter. The admittance model parameter is as follows:
= 1 kg, = 1 Ns/m, which will make the feed-forward system unstable, but the feedback system can
remain stable according to Figure 35, and the result is shown in Figure 38.