
Page 132 - Read Online
P. 132
Songthumjitti et al. Intell Robot 2023;3(3):306-36 I http://dx.doi.org/10.20517/ir.2023.20 Page 29 of 31
Figure 37. Feed-forward system and feedback system stability experiment with = 2 kg, = 1 Ns/m.
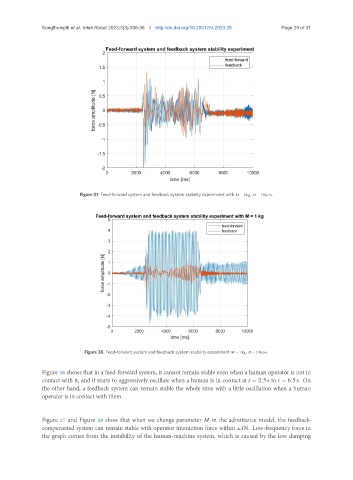
Figure 38. Feed-forward system and feedback system stability experiment = 1 kg, = 1 Ns/m.
Figure 38 shows that in a feed-forward system, it cannot remain stable even when a human operator is not in
contact with it, and it starts to aggressively oscillate when a human is in contact at = 2.5 s to = 6.5 s. On
the other hand, a feedback system can remain stable the whole time with a little oscillation when a human
operator is in contact with them.
Figure 37 and Figure 38 show that when we change parameter in the admittance model, the feedback-
compensated system can remain stable with operator interaction force within ±1N. Low-frequency force in
the graph comes from the instability of the human-machine system, which is caused by the low damping