
Page 123 - Read Online
P. 123
Page 20 of 31 Songthumjitti et al. Intell Robot 2023;3(3):306-36 I http://dx.doi.org/10.20517/ir.2023.20
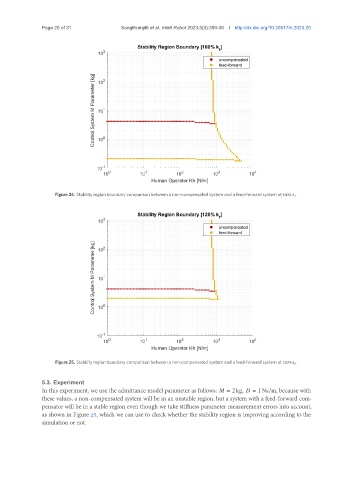
Figure 24. Stability region boundary comparison between a non-compensated system and a feed-forward system at 100% .
Figure 25. Stability region boundary comparison between a non-compensated system and a feed-forward system at 120% .
5.3. Experiment
In this experiment, we use the admittance model parameter as follows: = 2 kg, = 1 Ns/m, because with
these values, a non-compensated system will be in an unstable region, but a system with a feed-forward com-
pensator will be in a stable region even though we take stiffness parameter measurement errors into account,
as shown in Figure 25, which we can use to check whether the stability region is improving according to the
simulation or not.