
Page 41 - Read Online
P. 41
Sellers et al. Intell Robot 2022;2(4):33354 I http://dx.doi.org/10.20517/ir.2022.21 Page 347
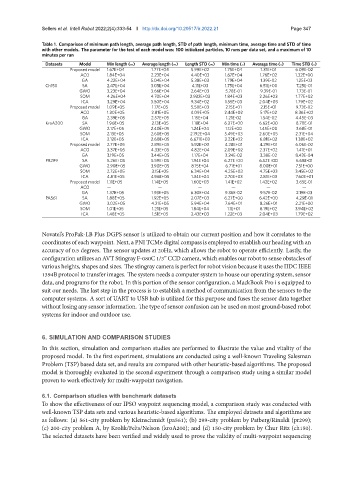
Table 1. Comparison of minimum path length, average path length, STD of path length, minimum time, average time and STD of time
with other models. The parameter for the test of each model was: 100 initialized particles, 10 runs per data set, and a maximum of 10
minutes per run
Datasets Model Min length ( ) Average length ( ) Length STD ( ) Min time ( ) Average time ( ) Time STD ( )
Proposed model 1.67E+04 1.77E+04 5.99E+02 1.75E+04 1.31E+01 6.09E-02
ACO 1.84E+04 2.23E+04 4.40E+03 1.67E+04 1.76E+02 1.32E+00
GA 4.22E+04 5.04E+04 5.38E+03 1.79E+04 1.39E-02 1.25E-03
Ch150 SA 2.47E+04 3.05E+04 4.11E+03 1.75E+04 6.51E+00 7.25E-01
GWO 3.23E+04 3.66E+04 2.64E+03 5.78E-01 9.39E-01 1.73E-01
SOM 4.26E+04 4.70E+04 2.932E+03 1.84E+03 2.26E+03 1.77E+02
ICA 3.29E+04 3.50E+04 9.34E+02 1.55E+03 2.04E+03 1.79E+02
Proposed model 1.09E+05 1.17E+05 5.50E+03 2.15E+01 2.15E+01 9.73E-02
ACO 1.30E+05 2.81E+05 4.09E+05 2.44E+02 5.17E+02 8.36E+02
GA 2.39E+05 2.57E+05 1.15E+04 1.21E-02 1.54E-02 4.45E-03
KroA200 SA 1.96E+05 2.13E+05 1.18E+04 6.27E+00 6.62E+00 8.70E-01
GWO 2.17E+05 2.40E+05 1.24E+04 1.12E+00 1.45E+00 3.68E-01
SOM 2.13E+05 2.60E+05 2.192E+04 5.49E+03 2.60E+05 2.31E+04
ICA 2.12E+05 2.60E+05 6.671E+03 3.22E+02 6.81E+02 1.38E+02
Proposed model 2.77E+05 2.89E+05 5.92E+03 4.28E+01 4.29E+01 6.06E-02
ACO 3.37E+05 4.33E+05 4.82E+04 2.09E+02 2.37E+02 1.41E+01
GA 3.19E+05 3.44E+05 1.17E+04 3.24E-02 3.38E-02 8.43E-04
PR299 SA 5.26E+05 5.59E+05 1.94E+04 6.27E+00 6.52E+00 6.68E-01
GWO 2.90E+05 3.90E+05 8.15E+04 6.71E+01 8.00E+01 7.51E+00
SOM 2.72E+05 3.15E+05 6.34E+04 4.25E+03 4.75E+03 3.45E+02
ICA 4.81E+05 4.96E+05 1.34E+04 2.70E+03 2.81E+03 7.60E+01
Proposed model 1.11E+05 1.14E+05 1.60E+03 1.41E+02 1.42E+02 3.65E-01
ACO — — — — — —
GA 1.37E+05 1.93E+05 6.30E+04 9.36E-02 9.57E-02 2.19E-03
PA561 SA 1.88E+05 1.92E+05 2.07E+03 6.27E+00 6.42E+00 4.29E-01
GWO 3.02E+05 4.21E+05 5.94E+04 7.64E+01 8.26E+01 2.21E+00
SOM 1.01E+05 1.21E+05 1.84E+04 1.1E+01 8.19E+02 3.94E+02
ICA 1.48E+05 1.51E+05 2.43E+03 1.22E+03 2.04E+03 1.79E+02
Novatel’s ProPak-LB Plus DGPS sensor is utilized to obtain our current position and how it correlates to the
coordinates of each waypoint. Next, a PNI TCM6 digital compass is employed to establish our heading with an
accuracy of 0.5 degrees. The sensor updates at 20Hz, which allows the robot to operate efficiently. Lastly, the
configurationutilizesanAVTStingrayF-080C1/3”CCDcamera, whichenablesourrobottosenseobstaclesof
various heights, shapes and sizes. The stingray camera is perfect for robot vision because it uses the IIDC IEEE
1394B protocol to transfer images. The system needs a computer system to house our operating system, sensor
data, and programs for the robot. In this portion of the sensor configuration, a MackBook Pro i s equipped to
suit our needs. The last step in the process is to establish a method of communication from the sensors to the
computer systems. A sort of UART to USB hub is utilized for this purpose and fuses the sensor data together
without losing any sensor information. The type of sensor confusion can be used on most ground-based robot
systems for indoor and outdoor use.
6. SIMULATION AND COMPARISON STUDIES
In this section, simulation and comparison studies are performed to illustrate the value and vitality of the
proposed model. In the first experiment, simulations are conducted using a well-known Traveling Salesman
Problem (TSP) based data set, and results are compared with other heuristic-based algorithms. The proposed
model is thoroughly evaluated in the second experiment through a comparison study using a similar model
proven to work effectively for multi-waypoint navigation.
6.1. Comparison studies with benchmark datasets
To show the effectiveness of our IPSO waypoint sequencing model, a comparison study was conducted with
well-known TSP data sets and various heuristic-based algorithms. The employed datasets and algorithms are
as follows: (a) 561-city problem by Kleinschmidt (pa561); (b) 299-city problem by Patberg/Rinaldi (pr299);
(c) 200-city problem A, by Krolik/Felts/Nelson (kroA200); and (d) 150-city problem by Chur Ritz (ch150).
The selected datasets have been verified and widely used to prove the validity of multi-waypoint sequencing