
Page 19 - Read Online
P. 19
Page 464 Phadke et al. Intell Robot 2023;3:453-78 https://dx.doi.org/10.20517/ir.2023.27
Figure 10. A swarm of UAVs searching for a person lost in a forest. UAV: unmanned aerial vehicle.
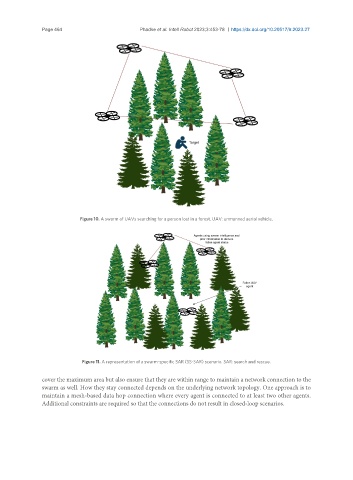
Figure 11. A representation of a swarm-specific SAR (SS-SAR) scenario. SAR: search and rescue.
cover the maximum area but also ensure that they are within range to maintain a network connection to the
swarm as well. How they stay connected depends on the underlying network topology. One approach is to
maintain a mesh-based data hop connection where every agent is connected to at least two other agents.
Additional constraints are required so that the connections do not result in closed-loop scenarios.