
Page 78 - Read Online
P. 78
Yang et al. Intell Robot 2024;4(1):107-24 I http://dx.doi.org/10.20517/ir.2024.07 Page 117
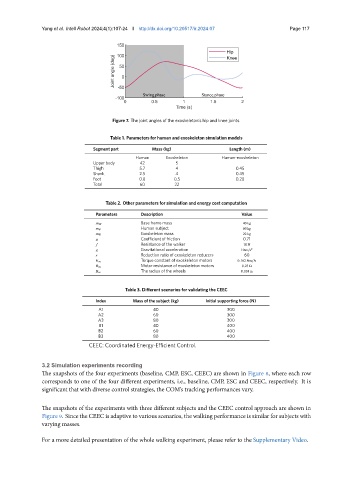
Figure 7. The joint angles of the exoskeleton’s hip and knee joints.
Table 1. Parameters for human and exoskeleton simulation models
Segment part Mass (kg) Length (m)
Human Exoskeleton Human-exoskeleton
Upper body 42 5
Thigh 5.7 4 0.45
Shank 2.5 4 0.45
Foot 0.8 0.5 0.28
Total 60 22
Table 2. Other parameters for simulation and energy cost computation
Parameters Description Value
Base frame mass 40 kg
Human subject 60 kg
Exoskeleton mass 22 kg
Coefficient of friction 0.71
Resistance of the walker 10 N
Gravitational acceleration 10 m/s 2
Reduction ratio of exoskeleton reducers 60
Torque constant of exoskeleton motors 0.162 Nm/A
Motor resistance of exoskeleton motors 0.23 Ω
The radius of the wheels 0.038 m
Table 3. Different scenarios for validating the CEEC
Index Mass of the subject (kg) Initial supporting force (N)
A1 40 300
A2 60 300
A3 80 300
B1 40 400
B2 60 400
B3 80 400
CEEC: Coordinated Energy-Efficient Control.
3.2 Simulation experiments recording
The snapshots of the four experiments (baseline, CMP, ESC, CEEC) are shown in Figure 8, where each row
corresponds to one of the four different experiments, i.e., baseline, CMP, ESC and CEEC, respectively. It is
significant that with diverse control strategies, the COM’s tracking performances vary.
The snapshots of the experiments with three different subjects and the CEEC control approach are shown in
Figure 9. Since the CEEC is adaptive to various scenarios, the walking performance is similar for subjects with
varying masses.
For a more detailed presentation of the whole walking experiment, please refer to the Supplementary Video.