
Page 57 - Read Online
P. 57
Tong et al. Intell Robot 2024;4:125-45 I http://dx.doi.org/10.20517/ir.2024.08 Page 135
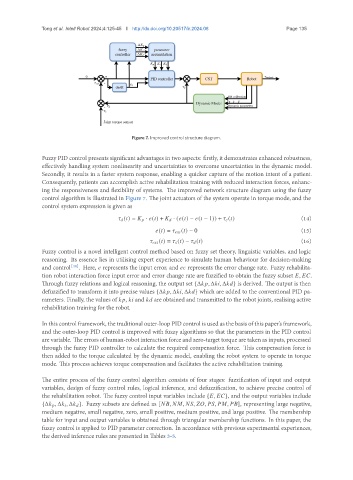
Figure 7. Improved control structure diagram.
Fuzzy PID control presents significant advantages in two aspects: firstly, it demonstrates enhanced robustness,
effectively handling system nonlinearity and uncertainties to overcome uncertainties in the dynamic model.
Secondly, it results in a faster system response, enabling a quicker capture of the motion intent of a patient.
Consequently, patients can accomplish active rehabilitation training with reduced interaction forces, enhanc-
ing the responsiveness and flexibility of systems. The improved network structure diagram using the fuzzy
control algorithm is illustrated in Figure 7. The joint actuators of the system operate in torque mode, and the
control system expression is given as
( ) = · ( ) + · ( ( ) − ( − 1)) + ( ) (14)
( ) = ( ) − 0 (15)
( ) = ( ) − ( ) (16)
Fuzzy control is a novel intelligent control method based on fuzzy set theory, linguistic variables, and logic
reasoning. Its essence lies in utilising expert experience to simulate human behaviour for decision-making
and control [40] . Here, represents the input error, and represents the error change rate. Fuzzy rehabilita-
tion robot interaction force input error and error change rate are fuzzified to obtain the fuzzy subset , .
Through fuzzy relations and logical reasoning, the output set {Δ , Δ , Δ } is derived. The output is then
defuzzified to transform it into precise values {Δ , Δ , Δ } which are added to the conventional PID pa-
rameters. Finally, the values of , and are obtained and transmitted to the robot joints, realising active
rehabilitation training for the robot.
In this control framework, the traditional outer-loop PID control is used as the basis of this paper’s framework,
and the outer-loop PID control is improved with fuzzy algorithms so that the parameters in the PID control
are variable. The errors of human-robot interaction force and zero-target torque are taken as inputs, processed
through the fuzzy PID controller to calculate the required compensation force. This compensation force is
then added to the torque calculated by the dynamic model, enabling the robot system to operate in torque
mode. This process achieves torque compensation and facilitates the active rehabilitation training.
The entire process of the fuzzy control algorithm consists of four stages: fuzzification of input and output
variables, design of fuzzy control rules, logical inference, and defuzzification, to achieve precise control of
the rehabilitation robot. The fuzzy control input variables include { , }, and the output variables include
{Δ , Δ , Δ }. Fuzzy subsets are defined as [ , , , , , , ], representing large negative,
medium negative, small negative, zero, small positive, medium positive, and large positive. The membership
table for input and output variables is obtained through triangular membership functions. In this paper, the
fuzzy control is applied to PID parameter correction. In accordance with previous experimental experiences,
the derived inference rules are presented in Tables 3-5.