
Page 138 - Read Online
P. 138
Page 423 Chen et al. Intell Robot 2023;3:420-35 https://dx.doi.org/10.20517/ir.2023.24
Figure 1. Overall structure of the wearable system.
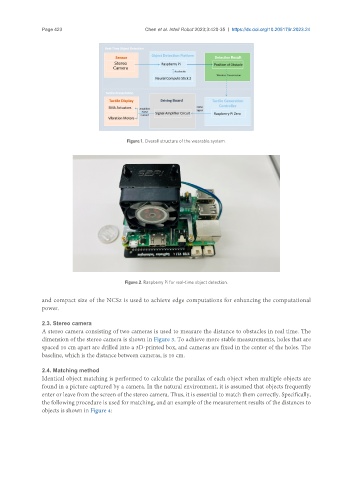
Figure 2. Raspberry Pi for real-time object detection.
and compact size of the NCS2 is used to achieve edge computations for enhancing the computational
power.
2.3. Stereo camera
A stereo camera consisting of two cameras is used to measure the distance to obstacles in real time. The
dimension of the stereo camera is shown in Figure 3. To achieve more stable measurements, holes that are
spaced 10 cm apart are drilled into a 3D-printed box, and cameras are fixed in the center of the holes. The
baseline, which is the distance between cameras, is 10 cm.
2.4. Matching method
Identical object matching is performed to calculate the parallax of each object when multiple objects are
found in a picture captured by a camera. In the natural environment, it is assumed that objects frequently
enter or leave from the screen of the stereo camera. Thus, it is essential to match them correctly. Specifically,
the following procedure is used for matching, and an example of the measurement results of the distances to
objects is shown in Figure 4: