
Page 74 - Read Online
P. 74
Page 18 of 20 Huang et al. Complex Eng Syst 2023;3:2 I http://dx.doi.org/10.20517/ces.2022.43
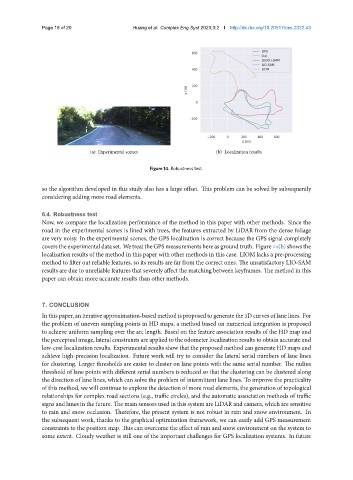
(a) Experimental scenes (b) Localization results
Figure 14. Robustness test.
so the algorithm developed in this study also has a large offset. This problem can be solved by subsequently
considering adding more road elements.
6.4. Robustness test
Now, we compare the localization performance of the method in this paper with other methods. Since the
road in the experimental scenes is lined with trees, the features extracted by LiDAR from the dense foliage
are very noisy. In the experimental scenes, the GPS localization is correct because the GPS signal completely
coverstheexperimentaldataset. WetreattheGPSmeasurementshereasgroundtruth. Figure14(b)showsthe
localization results of the method in this paper with other methods in this case. LIOM lacks a pre-processing
method to filter out reliable features, so its results are far from the correct ones. The unsatisfactory LIO-SAM
results are due to unreliable features that severely affect the matching between keyframes. The method in this
paper can obtain more accurate results than other methods.
7. CONCLUSION
In this paper, an iterative approximation-based method is proposed to generate the 3D curves of lane lines. For
the problem of uneven sampling points in HD maps, a method based on numerical integration is proposed
to achieve uniform sampling over the arc length. Based on the feature association results of the HD map and
the perceptual image, lateral constraints are applied to the odometer localization results to obtain accurate and
low-cost localization results. Experimental results show that the proposed method can generate HD maps and
achieve high-precision localization. Future work will try to consider the lateral serial numbers of lane lines
for clustering. Larger thresholds are easier to cluster on lane points with the same serial number. The radius
threshold of lane points with different serial numbers is reduced so that the clustering can be clustered along
the direction of lane lines, which can solve the problem of intermittent lane lines. To improve the practicality
of this method, we will continue to explore the detection of more road elements, the generation of topological
relationships for complex road sections (e.g., traffic circles), and the automatic association methods of traffic
signs and lanes in the future. The main sensors used in this system are LiDAR and camera, which are sensitive
to rain and snow occlusion. Therefore, the present system is not robust in rain and snow environment. In
the subsequent work, thanks to the graphical optimization framework, we can easily add GPS measurement
constraints to the position map. This can overcome the effect of rain and snow environment on the system to
some extent. Cloudy weather is still one of the important challenges for GPS localization systems. In future