
Page 72 - Read Online
P. 72
Kimbowa et al. Art Int Surg 2024;4:149-69 https://dx.doi.org/10.20517/ais.2024.20 Page 163
- Faster than Pourtaherian (2017) - Only in-plane needle insertion. Depends on availability of
- Method is fully automatic (doesn’t require needle data in image
feature engineering as methods that use - Can’t detect whole needle if there is shaft discontinuity
Gabor filters, etc.) - Detection algorithm very sensitive to data preprocessing
- Doesn’t require prior knowledge of needle - Only works for non-bending needles
insertion side and orientation - Reliance on an expert to determine ground-truth tip (not
- Robust in cases where the needle is slightly possible when tip information is completely invisible)
off-plane - Only in-plane
- Real-time detection rate (25 fps)
[60]
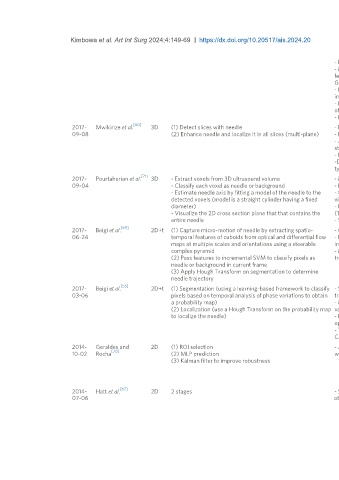
2017- Mwikirize et al. 3D (1) Detect slices with needle - Robust to high intensity artifacts - Assumes needle insertion side is known a priori
09-08 (2) Enhance needle and localize it in all slices (multi-plane) - low execution time - Assumes needle has minimal bending
- Accurate tip localization for moderate - Large gauge needle used (17G), may not work for thinner
steep insertion angles needles
- Robust even when shaft if discontinuous - Over all computation time of 3.5 s is high for real-time
-Detection accuracy is independent of tissue application
type - For only in plane needle insertion
2017- Pourtaherian et al. [71] 3D - Extract voxels from 3D ultrasound volume - Method is automated localization of needle - Only determines plane containing the needle but needle tip
09-04 - Classify each voxel as needle or background - High precision, low false negative rate is not localized
- Estimate needle axis by fitting a model of the needle to the - Can detect short needles- Intuitive - High computational complexity (2.19 s for a coarse-fine
detected voxels (model is a straight cylinder having a fixed visualization of the needle classification on GPU)
diameter) - Evaluated for both thin and large needles - Only in-plane needles
- Visualize the 2D cross section plane that that contains the (17G and 22G)
entire needle - Single network used
[69]
2017- Beigi et al. 2D+t (1) Capture micro-motion of needle by extracting spatio- - Can detect micro-motion of needle - Uses engineerd features
06-24 temporal features of cuboids from optical and differential flow - Doesn’t require prior knowledge of needle - In plane
maps at multiple scales and orientations using a steerable insertion side and angle - 17G needle (may not work for thinner needles)
complex pyramid - Mitigates other sources of motion such as - Requires motion, can’t detect static needle
(2) Pass features to incremental SVM to classify pixels as tremor - Only tested on curved array transducers
needle or background in current frame - Only in-plane needles
(3) Apply Hough Transform on segmentation to determine
needle trajectory
[55]
2017- Beigi et al. 2D+t (1) Segmentation (using a learning-based framework to classify - Superior parameter tuning (after model is - Only tested on needles with minimal bending
03-06 pixels based on temporal analysis of phase variations to obtain trained) - Used only 17G needles, may not work for thinner needles
a probability map) - More robust to imaging parameter - Only in-plane needles
(2) Localization (use a Hough Transform on the probability map variations
to localize the needle) - Has potential to adapt to different
operators in various applications
- Takes into account temporal information-
Can distinguish needle from tissue in contact
2014- Geraldes and 2D (1) ROI selection - Approach is evaluated over an entire video - High tip error
[70]
10-02 Rocha (2) MLP prediction with tip error provided for each frame - No other quantitative evaluation provided
(3) Kalman filter to improve robustness - Evaluated on just 2 videos
- Requires initial ROI selection
- Paper mentions that it focuses on flexible needles but used
straight needle
[67]
2014- Hatt et al. 2D 2 stages - Segmentation method robust in presence of - Does not work for curved needles as Radom transform
07-06 other high intensity artifacts considers straight paths through the image