
Page 72 - Read Online
P. 72
Zhong et al. Soft Sci. 2025, 5, 3 https://dx.doi.org/10.20517/ss.2024.52 Page 11 of 15
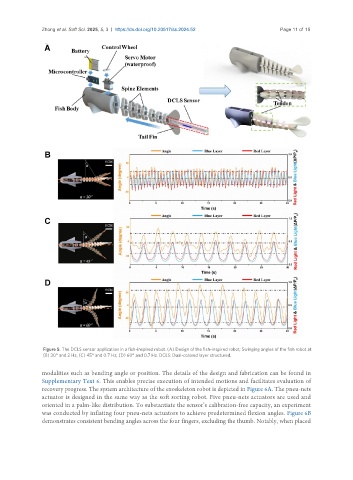
Figure 5. The DCLS sensor application in a fish-inspired robot. (A) Design of the fish-inspired robot; Swinging angles of the fish robot at
(B) 30° and 2 Hz, (C) 45° and 0.7 Hz, (D) 60° and 0.7 Hz. DCLS: Dual-colored layer structured.
modalities such as bending angle or position. The details of the design and fabrication can be found in
Supplementary Text 6. This enables precise execution of intended motions and facilitates evaluation of
recovery progress. The system architecture of the exoskeleton robot is depicted in Figure 6A. The pneu-nets
actuator is designed in the same way as the soft sorting robot. Five pneu-nets actuators are used and
oriented in a palm-like distribution. To substantiate the sensor’s calibration-free capacity, an experiment
was conducted by inflating four pneu-nets actuators to achieve predetermined flexion angles. Figure 6B
demonstrates consistent bending angles across the four fingers, excluding the thumb. Notably, when placed