
Page 82 - Read Online
P. 82
Page 388 Zhang et al. Intell Robot 2022;2(4):37190 I http://dx.doi.org/10.20517/ir.2022.26
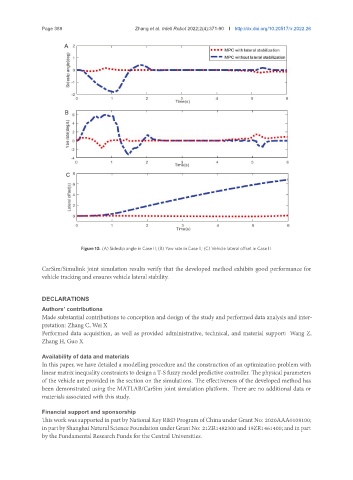
Figure 10. (A) Sideslip angle in Case II; (B) Yaw rate in Case II; (C) Vehicle lateral offset in Case II.
CarSim/Simulink joint simulation results verify that the developed method exhibits good performance for
vehicle tracking and ensures vehicle lateral stability.
DECLARATIONS
Authors’ contributions
Made substantial contributions to conception and design of the study and performed data analysis and inter-
pretation: Zhang C, Wei X
Performed data acquisition, as well as provided administrative, technical, and material support: Wang Z,
Zhang H, Guo X
Availability of data and materials
In this paper, we have detailed a modelling procedure and the construction of an optimization problem with
linear matrix inequality constraints to design a T-S fuzzy model predictive controller. The physical parameters
of the vehicle are provided in the section on the simulations. The effectiveness of the developed method has
been demonstrated using the MATLAB/CarSim joint simulation platform. There are no additional data or
materials associated with this study.
Financial support and sponsorship
This work was supported in part by National Key R&D Program of China under Grant No: 2020AAA0108100;
in part by Shanghai Natural Science Foundation under Grant No: 21ZR1482300 and 19ZR1461400; and in part
by the Fundamental Research Funds for the Central Universities.