
Page 81 - Read Online
P. 81
Zhang et al. Intell Robot 2022;2(4):37190 I http://dx.doi.org/10.20517/ir.2022.26 Page 387
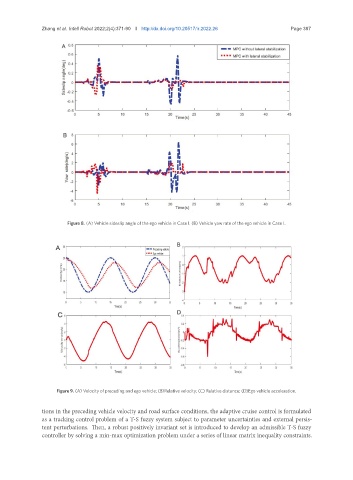
Figure 8. (A) Vehicle sideslip angle of the ego vehicle in Case I. (B) Vehicle yaw rate of the ego vehicle in Case I.
Figure 9. (A) Velocity of preceding and ego vehicle; (B)Relative velocity; (C) Relative distance; (D)Ego vehicle acceleration.
tions in the preceding vehicle velocity and road surface conditions, the adaptive cruise control is formulated
as a tracking control problem of a T-S fuzzy system subject to parameter uncertainties and external persis-
tent perturbations. Then, a robust positively invariant set is introduced to develop an admissible T-S fuzzy
controller by solving a min-max optimization problem under a series of linear matrix inequality constraints.