
Page 89 - Read Online
P. 89
Page 77 Shu et al. Intell Robot 2024;4(1):74-86 I http://dx.doi.org/10.20517/ir.2024.05
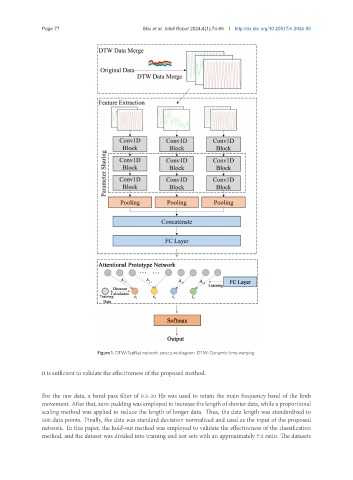
Figure 1. DTW-TapNet network structure diagram. DTW: Dynamic time warping.
it is sufficient to validate the effectiveness of the proposed method.
For the raw data, a band-pass filter of 0.3-20 Hz was used to retain the main frequency band of the limb
movement. After that, zero-padding was employed to increase the length of shorter data, while a proportional
scaling method was applied to reduce the length of longer data. Thus, the data length was standardized to
500 data points. Finally, the data was standard deviation normalized and used as the input of the proposed
network. In this paper, the hold-out method was employed to validate the effectiveness of the classification
method, and the dataset was divided into training and test sets with an approximately 7:3 ratio. The datasets