
Page 91 - Read Online
P. 91
Page 79 Shu et al. Intell Robot 2024;4(1):74-86 I http://dx.doi.org/10.20517/ir.2024.05
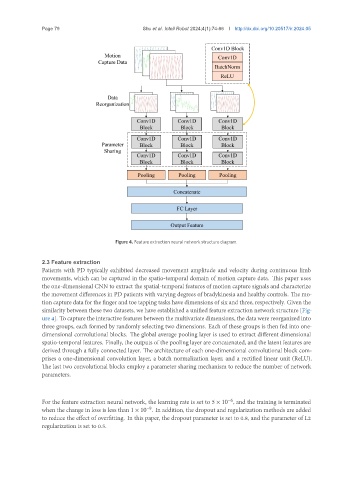
Figure 4. Feature extraction neural network structure diagram.
2.3 Feature extraction
Patients with PD typically exhibited decreased movement amplitude and velocity during continuous limb
movements, which can be captured in the spatio-temporal domain of motion capture data. This paper uses
the one-dimensional CNN to extract the spatial-temporal features of motion capture signals and characterize
the movement differences in PD patients with varying degrees of bradykinesia and healthy controls. The mo-
tion capture data for the finger and toe tapping tasks have dimensions of six and three, respectively. Given the
similarity between these two datasets, we have established a unified feature extraction network structure [Fig-
ure 4]. To capture the interactive features between the multivariate dimensions, the data were reorganized into
three groups, each formed by randomly selecting two dimensions. Each of these groups is then fed into one-
dimensional convolutional blocks. The global average pooling layer is used to extract different dimensional
spatio-temporal features. Finally, the outputs of the pooling layer are concatenated, and the latent features are
derived through a fully connected layer. The architecture of each one-dimensional convolutional block com-
prises a one-dimensional convolution layer, a batch normalization layer, and a rectified linear unit (ReLU).
The last two convolutional blocks employ a parameter sharing mechanism to reduce the number of network
parameters.
For the feature extraction neural network, the learning rate is set to 5 × 10 , and the training is terminated
−6
−9
when the change in loss is less than 1 × 10 . In addition, the dropout and regularization methods are added
to reduce the effect of overfitting. In this paper, the dropout parameter is set to 0.8, and the parameter of L2
regularization is set to 0.5.