
Page 71 - Read Online
P. 71
Page 110 Yang et al. Intell Robot 2024;4(1):107-24 I http://dx.doi.org/10.20517/ir.2024.07
Support Force Optimization
The demodulation step
J(· )
ξ(k) High-pass
− Energy cost, Stepping length
Filter
Walking Energy Efficiency
cos( )
Human-Exoskeleton-Walker System
The modulation step
∆ ( ) Stepper + cos( )
Motor
and
− sin( )
Coordinated Motion Planning The joint angles of the wheel Joint angles for exoskeletons
Motion Planning
Kinematic
Computation
Reference trajectory of COM
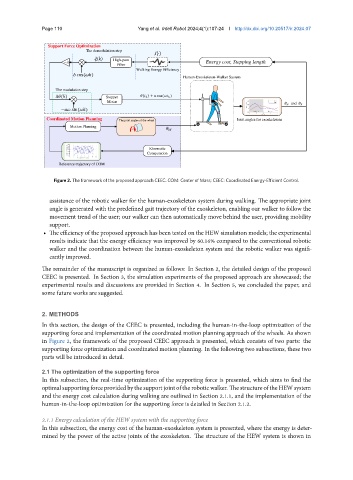
Figure 2. The framework of the proposed approach CEEC. COM: Center of Mass; CEEC: Coordinated Energy-Efficient Control.
assistance of the robotic walker for the human-exoskeleton system during walking. The appropriate joint
angle is generated with the predefined gait trajectory of the exoskeleton, enabling our walker to follow the
movement trend of the user; our walker can then automatically move behind the user, providing mobility
support.
• The efficiency of the proposed approach has been tested on the HEW simulation models; the experimental
results indicate that the energy efficiency was improved by 60.16% compared to the conventional robotic
walker and the coordination between the human-exoskeleton system and the robotic walker was signifi-
cantly improved.
The remainder of the manuscript is organized as follows: In Section 2, the detailed design of the proposed
CEEC is presented. In Section 3, the simulation experiments of the proposed approach are showcased; the
experimental results and discussions are provided in Section 4. In Section 5, we concluded the paper, and
some future works are suggested.
2. METHODS
In this section, the design of the CEEC is presented, including the human-in-the-loop optimization of the
supporting force and implementation of the coordinated motion planning approach of the wheels. As shown
in Figure 2, the framework of the proposed CEEC approach is presented, which consists of two parts: the
supporting force optimization and coordinated motion planning. In the following two subsections, these two
parts will be introduced in detail.
2.1 The optimization of the supporting force
In this subsection, the real-time optimization of the supporting force is presented, which aims to find the
optimal supporting force provided by the support joint of the robotic walker. The structure of the HEW system
and the energy cost calculation during walking are outlined in Section 2.1.1, and the implementation of the
human-in-the-loop optimization for the supporting force is detailed in Section 2.1.2.
2.1.1 Energy calculation of the HEW system with the supporting force
In this subsection, the energy cost of the human-exoskeleton system is presented, where the energy is deter-
mined by the power of the active joints of the exoskeleton. The structure of the HEW system is shown in