
Page 46 - Read Online
P. 46
Wu. Intell Robot 2021;1(2):99-115 I http://dx.doi.org/10.20517/ir.2021.11 Page 111
1 1.5
without payload without payload
0.8 with payload with payload
1
0.6
0.4
0.5
0.2
x [mm] 0 y [mm] 0
−0.2
−0.5
−0.4
−0.6
−1
−0.8
−1 −1.5
0 0.1 0.2 0.3 0.4 0.5 0 0.1 0.2 0.3 0.4 0.5
time [s] time [s]
(a) (b)
0.5 1
without payload without payload
0.4 with payload 0.8 with payload
0.3 0.6
0.2 0.4
0.1 0.2
z [mm] 0 φ x [deg] 0
−0.1 −0.2
−0.2 −0.4
−0.3 −0.6
−0.4 −0.8
−0.5 −1
0 0.1 0.2 0.3 0.4 0.5 0 0.1 0.2 0.3 0.4 0.5
time [s] time [s]
(c) (d)
2 2
without payload without payload
with payload with payload
1.5 1.5
1 1
0.5 0.5
φ y [deg] 0 φ z [deg] 0
−0.5 −0.5
−1 −1
−1.5 −1.5
−2 −2
0 0.1 0.2 0.3 0.4 0.5 0 0.1 0.2 0.3 0.4 0.5
time [s] time [s]
(e) (f)
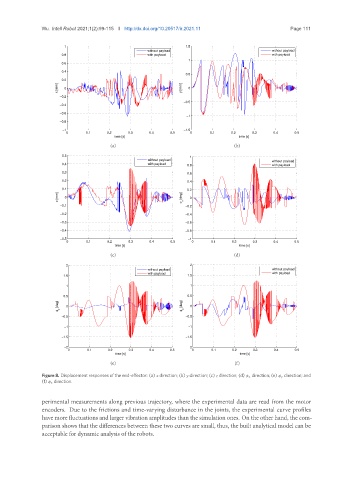
Figure 8. Displacement responses of the end-effector: (a) direction; (b) direction; (c) direction; (d) direction; (e) direction; and
(f) direction.
perimental measurements along previous trajectory, where the experimental data are read from the motor
encoders. Due to the frictions and time-varying disturbance in the joints, the experimental curve profiles
have more fluctuations and larger vibration amplitudes than the simulation ones. On the other hand, the com-
parison shows that the differences between these two curves are small, thus, the built analytical model can be
acceptable for dynamic analysis of the robots.