
Page 58 - Read Online
P. 58
Page 364 Sun et al. Intell Robot 2022;2(4):35570 I http://dx.doi.org/10.20517/ir.2022.23
Figure 14. Design and static analysis of ROV buoyancy material: (A) design of ROV buoyancy material; (B) structure stress analysis; and
(C) structural strain analysis.
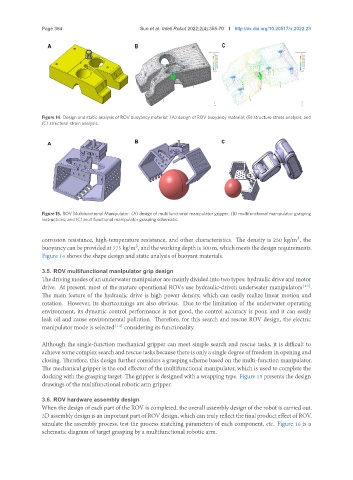
Figure 15. ROV Multifunctional Manipulator: (A) design of multifunctional manipulator gripper; (B) multifunctional manipulator grasping
instructions; and (C) multifunctional manipulator grasping schematic.
corrosion resistance, high-temperature resistance, and other characteristics. The density is 250 kg/m , the
3
buoyancycanbeprovidedat775kg/m , andtheworkingdepth is 300m, whichmeets thedesign requirements.
3
Figure 14 shows the shape design and static analysis of buoyant materials.
3.5. ROV multifunctional manipulator grip design
Thedrivingmodesofanunderwatermanipulatoraremainlydividedintotwotypes: hydraulicdriveandmotor
drive. At present, most of the mature operational ROVs use hydraulic-driven underwater manipulators [13] .
The main feature of the hydraulic drive is high power density, which can easily realize linear motion and
rotation. However, its shortcomings are also obvious. Due to the limitation of the underwater operating
environment, its dynamic control performance is not good, the control accuracy is poor, and it can easily
leak oil and cause environmental pollution. Therefore, for this search and rescue ROV design, the electric
manipulator mode is selected [14] considering its functionality.
Although the single-function mechanical gripper can meet simple search and rescue tasks, it is difficult to
achieve some complex search and rescue tasks because there is only a single degree of freedom in opening and
closing. Therefore, this design further considers a grasping scheme based on the multi-function manipulator.
The mechanical gripper is the end effector of the multifunctional manipulator, which is used to complete the
docking with the grasping target. The gripper is designed with a wrapping type. Figure 15 presents the design
drawings of the multifunctional robotic arm gripper.
3.6. ROV hardware assembly design
When the design of each part of the ROV is completed, the overall assembly design of the robot is carried out.
3D assembly design is an important part of ROV design, which can truly reflect the final product effect of ROV,
simulate the assembly process, test the process matching parameters of each component, etc. Figure 16 is a
schematic diagram of target grasping by a multifunctional robotic arm.