
Page 11 - Read Online
P. 11
Zhu et al. Intell Robot 2022;2(3):200222 I http://dx.doi.org/10.20517/ir.2022.13 Page 204
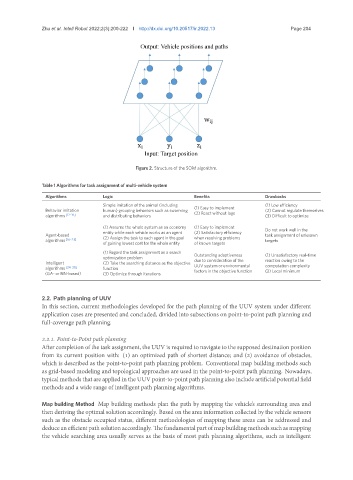
Figure 2. Structure of the SOM algorithm.
Table 1 Algorithms for task assignment of multi-vehicle system
Algorithms Logic Benefits Drawbacks
Simple imitation of the animal (including (1) Low efficiency
Behavior imitation human) grouping behaviors such as swarming (1) Easy to implement (2) Cannot regulate themselves
algorithms [12–15] and distributing behaviors (2) React without lags (3) Difficult to optimize
(1) Assume the whole system as an economy (1) Easy to implement Do not work well in the
entity while each vehicle works as an agent (2) Satisfactory efficiency
Agent-based task assignment of unknown
algorithms [16–23] (2) Assign the task to each agent in the goal when resolving problems targets
of gaining lowest cost for the whole entity of known targets
(1) Regard the task assignment as a search
optimization problem Outstanding adaptiveness (1) Unsatisfactory real-time
Intelligent (2) Take the searching distance as the objective due to consideration of the reaction owing to the
algorithms [24–30] function UUV system or environmental computation complexity
(GA- or NN-based) (3) Optimize through iterations factors in the objective function (2) Local minimum
2.2. Path planning of UUV
In this section, current methodologies developed for the path planning of the UUV system under different
application cases are presented and concluded, divided into subsections on point-to-point path planning and
full-coverage path planning.
2.2.1. Point-to-Point path planning
After completion of the task assignment, the UUV is required to navigate to the supposed destination position
from its current position with: (1) an optimized path of shortest distance; and (2) avoidance of obstacles,
which is described as the point-to-point path planning problem. Conventional map building methods such
as grid-based modeling and topological approaches are used in the point-to-point path planning. Nowadays,
typical methods that are applied in the UUV point-to-point path planning also include artificial potential field
methods and a wide range of intelligent path planning algorithms.
Map building Method Map building methods plan the path by mapping the vehicle’s surrounding area and
then deriving the optimal solution accordingly. Based on the area information collected by the vehicle sensors
such as the obstacle occupied status, different methodologies of mapping these areas can be addressed and
deduceanefficientpathsolutionaccordingly. Thefundamentalpartofmapbuildingmethodssuchasmapping
the vehicle searching area usually serves as the basis of most path planning algorithms, such as intelligent