
Page 15 - Read Online
P. 15
Zhu et al. Intell Robot 2022;2(3):200222 I http://dx.doi.org/10.20517/ir.2022.13 Page 208
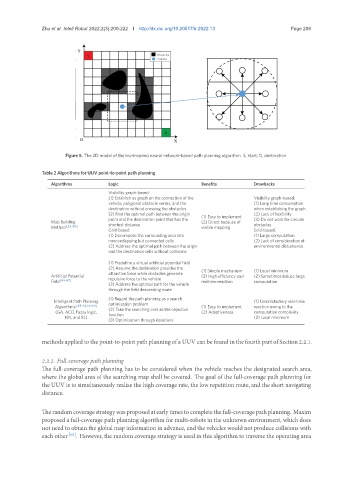
Figure 5. The 2D model of the bio-inspired neural network-based path planning algorithm. S, start; D, destination.
Table 2 Algorithms for UUV point-to-point path planning
Algorithms Logic Benefits Drawbacks
Visibility graph-based:
(1) Establish as graph on the connection of the Visibility graph-based:
vehicle, polygonal obstacle vertex, and the (1) Long time consumption
destination without crossing the obstacles when establishing the graph
(2) Find the optimal path between the origin (1) Easy to implement (2) Lack of flexibility
point and the destination point that has the (3) Do not work for circular
Map Building (2) Direct because of
Method [33–40] shortest distance visible mapping obstacles
Grid-based: Grid-based:
(1) Decompose the surrounding area into (1) Large computation
nonoverlapping but connected cells (2) Lack of consideration of
(2) Address the optimal path between the origin environmental disturbance
and the destination cells without collisions
(1) Predefine a virtual artificial potential field
(2) Assume the destination provides the (1) Simple mechanism (1) Local minimum
attractive force while obstacles generate
Artificial Potential (2) High efficiency and (2) Sometimes induce large
Field [41–47] repulsive force to the vehicle realtime reaction computation
(3) Address the optimal path for the vehicle
through the field descending route
(1) Regard the path planning as a search
Intelligent Path Planning optimization problem (1) Unsatisfactory real-time
Algorithms [48–52,55–64] (2) Take the searching cost as the objective (1) Easy to implement reaction owing to the
(GA, ACO, Fuzzy logic, function (2) Adaptiveness. computation complexity
NN, and RL) (2) Local minimum
(3) Optimization through iterations
methods applied to the point-to-point path planning of a UUV can be found in the fourth part of Section 2.2.1.
2.2.2. Full-coverage path planning
The full-coverage path planning has to be considered when the vehicle reaches the designated search area,
where the global area of the searching map shall be covered. The goal of the full-coverage path planning for
the UUV is to simultaneously realize the high coverage rate, the low repetition route, and the short navigating
distance.
Therandomcoveragestrategywasproposedatearlytimestocompletethefull-coveragepathplanning. Maxim
proposed a full-coverage path planning algorithm for multi-robots in the unknown environment, which does
not need to obtain the global map information in advance, and the vehicles would not produce collisions with
each other [65] . However, the random coverage strategy is used in this algorithm to traverse the operating area