
Page 39 - Read Online
P. 39
Page 188 Chen et al. Intell Robot 2024;4:179-95 I http://dx.doi.org/10.20517/ir.2024.11
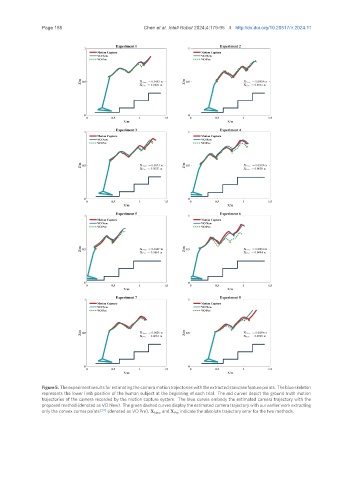
Figure 5. The experiment results for estimating the camera motion trajectories with the extracted staircase feature points. The blue skeleton
represents the lower limb position of the human subject at the beginning of each trial. The red curves depict the ground truth motion
trajectories of the camera recorded by the motion capture system. The blue curves embody the estimated camera trajectory with the
proposed method (denoted as VO New). The green dashed curves display the estimated camera trajectory with our earlier work extracting
only the convex corner points [31] (denoted as VO Pre). X New and X Pre indicate the absolute trajectory error for the two methods.