
Page 40 - Read Online
P. 40
Chen et al. Intell Robot 2024;4:179-95 I http://dx.doi.org/10.20517/ir.2024.11 Page 189
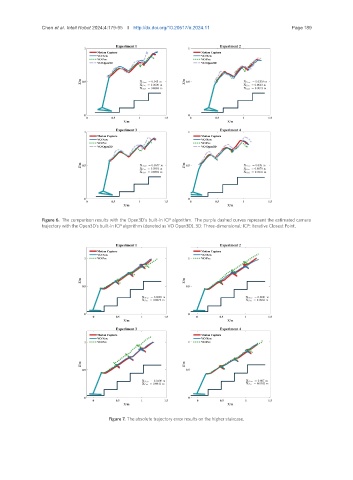
Figure 6. The comparison results with the Open3D’s built-in ICP algorithm. The purple dashed curves represent the estimated camera
trajectory with the Open3D’s built-in ICP algorithm (denoted as VO Open3D). 3D: Three-dimensional; ICP: Iterative Closest Point.
Figure 7. The absolute trajectory error results on the higher staircase.