
Page 168 - Read Online
P. 168
Page 18 of 19 Ao et al. Intell Robot 2023;3(4):495-513 I http://dx.doi.org/10.20517/ir.2023.28
robust myoelectric control. IEEE Trans Neural Syst Rehabil Eng 2021;29:2345-54. DOI
26. Liu ZW, Dong Y, Wang YJ, Lu MJ, Li RR. EGNN: graph structure learning based on evolutionary computation helps more in graph neural
networks. Applied Soft Computing 2023;135:110040. DOI
27. Wen Q, Salih EO, Zhijun L, Aldo M, Rong S. Multi-sensor guided hand gesture recognition for a teleoperated robot using a recurrent
neural network. IEEE Robot Autom Lett 2021;6:6039-45. DOI
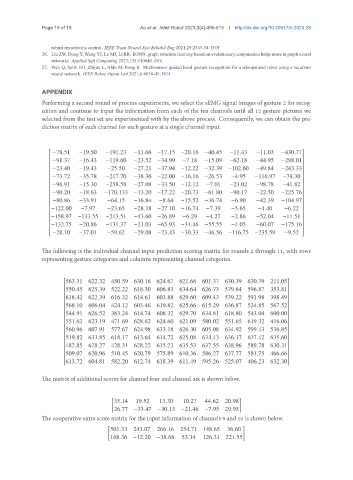
APPENDIX
Performing a second round of process experiments, we select the sEMG signal images of gesture 2 for recog-
nition and continue to input the information from each of the ten channels until all 12 gesture pictures we
selected from the test set are experimented with by the above process. Consequently, we can obtain the pre-
diction matrix of each channel for each gesture at a single channel input.
−78.51 −19.50 −191.23 −11.66 −17.15 −20.16 −40.45 −11.43 −11.03 −430.77
−91.37 −16.43 −119.60 −23.52 −34.99 −7.18 −15.09 −62.18 −44.95 −288.01
−23.40 −19.43 −25.50 −27.21 −37.94 −12.22 −32.39 −102.60 −49.84 −243.33
−73.72 −35.78 −217.70 −38.36 −22.00 −16.16 −26.53 −4.95 −116.97 −74.30
−96.91 −15.30 −258.58 −27.08 −33.50 −12.12 −7.01 −23.02 −98.78 −41.82
−90.20 −18.63 −170.133 −13.20 −17.22 −20.73 −61.80 −90.17 −22.50 −225.76
−80.86 −33.91 −64.15 −16.84 −8.64 −15.52 −36.74 −6.90 −42.39 −104.97
−122.00 −7.97 −23.65 −28.18 −27.10 −16.74 −7.39 −5.65 −4.40 −6.22
−158.97 −133.55 −213.51 −13.60 −26.89 −6.29 −4.27 −2.86 −52.04 −11.51
−132.75 −20.86 −131.37 −21.03 −65.93 −31.46 −55.55 −4.05 −60.07 −175.16
−28.10 −37.01 −59.62 −29.08 −23.43 −30.33 −46.56 −116.75 −235.59 −9.52
The following is the individual channel input prediction scoring matrix for rounds 2 through 11, with rows
representing gesture categories and columns representing channel categories.
563.31 622.32 450.59 630.16 624.67 621.66 601.37 630.39 630.79 211.05
550.45 625.39 522.22 618.30 606.83 634.64 626.73 579.64 596.87 353.81
618.42 622.39 616.32 614.61 603.88 629.60 609.43 539.22 591.98 398.49
568.10 606.04 424.12 603.46 619.82 625.66 615.29 636.87 524.85 567.52
544.91 626.52 383.24 614.74 608.32 629.70 634.81 618.80 543.04 600.00
551.62 623.19 471.69 628.62 624.60 621.09 580.02 551.65 619.32 416.06
560.96 607.91 577.67 624.98 633.18 626.30 605.08 634.92 599.43 536.85
519.82 633.85 618.17 613.64 614.72 625.08 634.43 636.17 637.42 635.60
482.85 628.27 428.31 628.22 615.23 635.53 637.55 638.96 589.78 630.31
509.07 620.96 510.45 620.79 575.89 610.36 586.27 637.77 581.75 466.66
613.72 604.81 582.20 612.74 618.39 611.49 595.26 525.07 406.23 632.30
The matrix of additional scores for channel four and channel six is shown below.
[ ]
35.14 19.52 13.30 10.27 44.62 20.98
26.77 −33.47 −30.13 −21.46 −7.95 29.95
The cooperative extra score matrix for the input information of channels 9 and 10 is shown below.
[ ]
501.33 243.07 266.16 254.71 148.65 36.60
168.36 −12.20 −38.68 53.34 126.31 221.55