
Page 10 - Read Online
P. 10
Page 2 of 9 Gumbs et al. Mini-invasive Surg 2020;4:90 I http://dx.doi.org/10.20517/2574-1225.2020.110
A
B
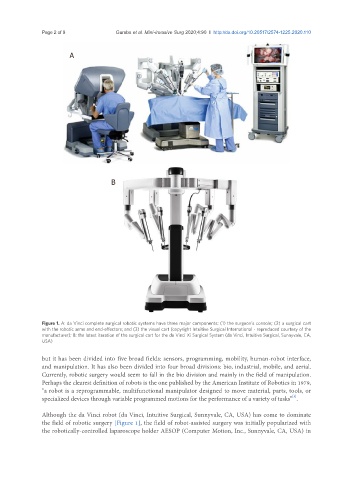
Figure 1. A: da Vinci complete surgical robotic systems have three major components: (1) the surgeon’s console; (2) a surgical cart
with the robotic arms and end-effectors; and (3) the visual cart (copyright Intuitive Surgical International - reproduced courtesy of the
manufacturer); B: the latest iteration of the surgical cart for the da Vinci Xi Surgical System (da Vinci, Intuitive Surgical, Sunnyvale, CA,
USA)
but it has been divided into five broad fields: sensors, programming, mobility, human-robot interface,
and manipulation. It has also been divided into four broad divisions: bio, industrial, mobile, and aerial.
Currently, robotic surgery would seem to fall in the bio division and mainly in the field of manipulation.
Perhaps the clearest definition of robots is the one published by the American Institute of Robotics in 1979,
“a robot is a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or
[1]
specialized devices through variable programmed motions for the performance of a variety of tasks” .
Although the da Vinci robot (da Vinci, Intuitive Surgical, Sunnyvale, CA, USA) has come to dominate
the field of robotic surgery [Figure 1], the field of robot-assisted surgery was initially popularized with
the robotically-controlled laparoscope holder AESOP (Computer Motion, Inc., Sunnyvale, CA, USA) in