
Page 17 - Read Online
P. 17
Wu et al. Intell Robot 2022;2(2):10529 I http://dx.doi.org/10.20517/ir.2021.20 Page 115
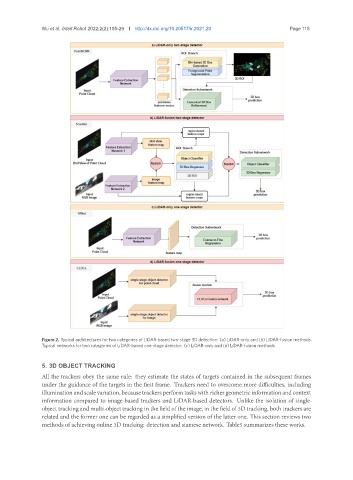
Figure 2. Typical architectures for two categories of LiDAR-based two-stage 3D detection: (a) LiDAR-only and (b) LiDAR-fusion methods.
Typical networks for two categories of LiDAR-based one-stage detector: (c) LiDAR-only and (d) LiDAR-fusion methods.
5. 3D OBJECT TRACKING
All the trackers obey the same rule: they estimate the states of targets contained in the subsequent frames
under the guidance of the targets in the first frame. Trackers need to overcome more difficulties, including
illuminationandscalevariation, becausetrackersperformtaskswithrichergeometricinformationandcontext
information compared to image-based trackers and LiDAR-based detectors. Unlike the isolation of single-
object tracking and multi-object tracking in the field of the image, in the field of 3D tracking, both trackers are
related and the former one can be regarded as a simplified version of the latter one. This section reviews two
methods of achieving online 3D tracking: detection and siamese network. Table5 summarizes these works.