
Page 14 - Read Online
P. 14
Page 158 Ji et al. Intell Robot 2021;1(2):151-75 https://dx.doi.org/10.20517/ir.2021.14
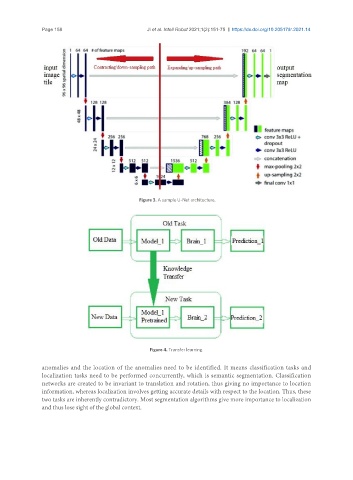
Figure 3. A sample U-Net architecture.
Figure 4. Transfer learning.
anomalies and the location of the anomalies need to be identified. It means classification tasks and
localization tasks need to be performed concurrently, which is semantic segmentation. Classification
networks are created to be invariant to translation and rotation, thus giving no importance to location
information, whereas localization involves getting accurate details with respect to the location. Thus, these
two tasks are inherently contradictory. Most segmentation algorithms give more importance to localization
and thus lose sight of the global context.