
Page 38 - Read Online
P. 38
Xu et al. J Surveill Secur Saf 2020;1:16-33 I http://dx.doi.org/10.20517/jsss.2020.04 Page 31
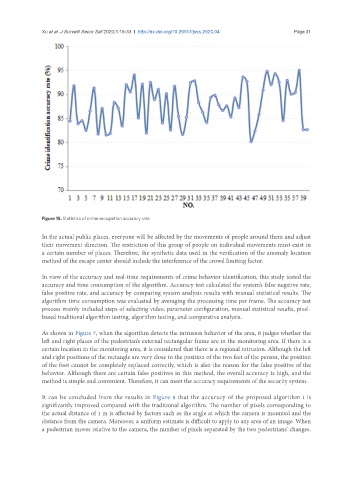
Figure 15. Statistics of crime recognition accuracy rate
In the actual public places, everyone will be affected by the movements of people around them and adjust
their movement direction. The restriction of this group of people on individual movements must exist in
a certain number of places. Therefore, the synthetic data used in the verification of the anomaly location
method of the escape center should include the interference of the crowd limiting factor.
In view of the accuracy and real-time requirements of crime behavior identification, this study tested the
accuracy and time consumption of the algorithm. Accuracy test calculated the system’s false negative rate,
false positive rate, and accuracy by comparing system analysis results with manual statistical results. The
algorithm time consumption was evaluated by averaging the processing time per frame. The accuracy test
process mainly included steps of selecting video, parameter configuration, manual statistical results, pixel-
based traditional algorithm testing, algorithm testing, and comparative analysis.
As shown in Figure 7, when the algorithm detects the intrusion behavior of the area, it judges whether the
left and right places of the pedestrian’s external rectangular frame are in the monitoring area. If there is a
certain location in the monitoring area, it is considered that there is a regional intrusion. Although the left
and right positions of the rectangle are very close to the position of the two feet of the person, the position
of the foot cannot be completely replaced correctly, which is also the reason for the false positive of the
behavior. Although there are certain false positives in this method, the overall accuracy is high, and the
method is simple and convenient. Therefore, it can meet the accuracy requirements of the security system.
It can be concluded from the results in Figure 8 that the accuracy of the proposed algorithm i is
significantly improved compared with the traditional algorithm. The number of pixels corresponding to
the actual distance of 1 m is affected by factors such as the angle at which the camera is mounted and the
distance from the camera. Moreover, a uniform estimate is difficult to apply to any area of an image. When
a pedestrian moves relative to the camera, the number of pixels separated by the two pedestrians’ changes.