
Page 84 - Read Online
P. 84
Yu et al. Intell Robot 2022;2:180-99 https://dx.doi.org/10.20517/ir.2022.10 Page 182
Table 1. Propulsion modes of robot fishes
Propulsion Propellers Strengths Applications
modes
BCF Body and/or caudal fin 1. High swimming speed Requiring high speed
2. High quick start performance Requiring instantaneous
acceleration
MPF Median and/or paired fin High maneuverability Requiring maneuvering to turn
High propulsion efficiency Requiring long-term swimming
Good stability Rapid water flow
BCF-MPF Cooperation of the caudal and pectoral Balancing swimming speed and propulsion Broader than either individually
fins efficiency
Table 2. The body structures of robot fishes
Body structures Strengths Weaknesses
Rigid High swimming speed Poor maneuverability
Soft Great maneuverability Low swimming speed
Rigid-soft coupled Achieving great maneuverability while generating high swimming speed with a reasonable design
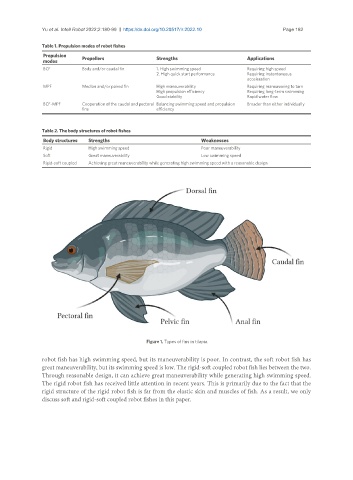
Figure 1. Types of fins in tilapia.
robot fish has high swimming speed, but its maneuverability is poor. In contrast, the soft robot fish has
great maneuverability, but its swimming speed is low. The rigid-soft coupled robot fish lies between the two.
Through reasonable design, it can achieve great maneuverability while generating high swimming speed.
The rigid robot fish has received little attention in recent years. This is primarily due to the fact that the
rigid structure of the rigid robot fish is far from the elastic skin and muscles of fish. As a result, we only
discuss soft and rigid-soft coupled robot fishes in this paper.