
Page 57 - Read Online
P. 57
Page 52 Harib et al. Intell Robot 2022;2(1):37-71 https://dx.doi.org/10.20517/ir.2021.19
Figure 4. The Cart-pole scheme.
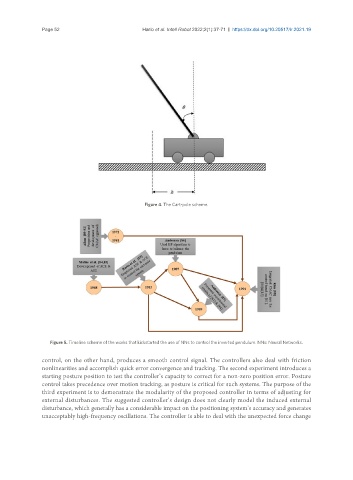
Figure 5. Timeline scheme of the works that kickstarted the use of NNs to control the inverted pendulum. NNs: Neural Networks.
control, on the other hand, produces a smooth control signal. The controllers also deal with friction
nonlinearities and accomplish quick error convergence and tracking. The second experiment introduces a
starting posture position to test the controller’s capacity to correct for a non-zero position error. Posture
control takes precedence over motion tracking, as posture is critical for such systems. The purpose of the
third experiment is to demonstrate the modularity of the proposed controller in terms of adjusting for
external disturbances. The suggested controller’s design does not clearly model the induced external
disturbance, which generally has a considerable impact on the positioning system’s accuracy and generates
unacceptably high-frequency oscillations. The controller is able to deal with the unexpected force change