
Page 33 - Read Online
P. 33
Bernardo et al. Intell Robot 2021;1(2):116-30 I http://dx.doi.org/10.20517/ir.2021.10 Page 126
( d e f i n e ( p r o b l e m t a s k )
( : d o m a i n AMMR)
( : o b j e c t s
L i v i n g R o o m BedRoom − Rooms
r o b o t _ b a s e − r o b o t
p0 p1 p2 p3 − p _ g o a l
o b j 1 d o c k − O b j e c t s
r o b o t i q − g r i p p e r
)
( : i n i t
( a t r o b o t _ b a s e d o c k )
( at − arm p0 )
( g r i p p e r _ i s _ f r e e r o b o t i q )
( a l l o b j 1 p3 r o b o t _ b a s e L i v i n g R o o m )
( d o c k e d r o b o t _ b a s e )
( d o c k _ a t d o c k )
)
( : g o a l ( and
( a t o b j 1 p2 r o b o t _ b a s e BedRoom )
( d o c k e d r o b o t _ b a s e )
) )
)
Figure 6. Task definition in PDDL.
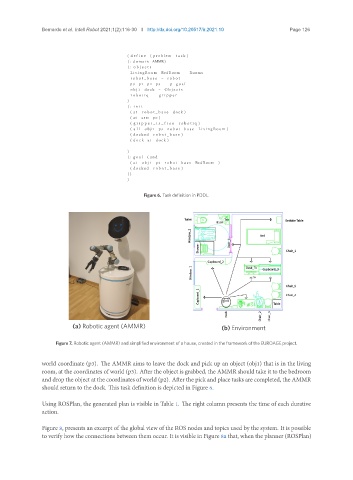
(a) Robotic agent (AMMR) (b) Environment
Figure 7. Robotic agent (AMMR) and simplified environment of a house, created in the framework of the EUROAGE project.
world coordinate (p3). The AMMR aims to leave the dock and pick up an object (obj1) that is in the living
room, at the coordinates of world (p3). After the object is grabbed, the AMMR should take it to the bedroom
and drop the object at the coordinates of world (p2). After the pick and place tasks are completed, the AMMR
should return to the dock. This task definition is depicted in Figure 6.
Using ROSPlan, the generated plan is visible in Table 1. The right column presents the time of each durative
action.
Figure 8, presents an excerpt of the global view of the ROS nodes and topics used by the system. It is possible
to verify how the connections between them occur. It is visible in Figure 8a that, when the planner (ROSPlan)