
Page 31 - Read Online
P. 31
Page 12 of 22 Ernest et al. Complex Eng Syst 2023;3:4 I http://dx.doi.org/10.20517/ces.2022.54
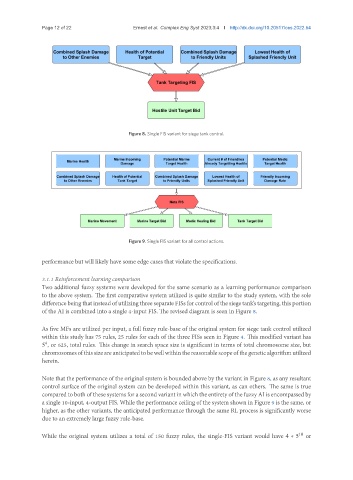
Figure 8. Single FIS variant for siege tank control.
Figure 9. Single FIS variant for all control actions.
performance but will likely have some edge cases that violate the specifications.
3.1.1 Reinforcement learning comparison
Two additional fuzzy systems were developed for the same scenario as a learning performance comparison
to the above system. The first comparative system utilized is quite similar to the study system, with the sole
difference being that instead of utilizing three separate FISs for control of the siege tank’s targeting, this portion
of the AI is combined into a single 4-input FIS. The revised diagram is seen in Figure 8.
As five MFs are utilized per input, a full fuzzy rule-base of the original system for siege tank control utilized
within this study has 75 rules, 25 rules for each of the three FISs seen in Figure 4. This modified variant has
5 , or 625, total rules. This change in search space size is significant in terms of total chromosome size, but
4
chromosomesofthissizeareanticipatedtobewellwithinthereasonablescopeofthegeneticalgorithmutilized
herein.
Note that the performance of the original system is bounded above by the variant in Figure 8, as any resultant
control surface of the original system can be developed within this variant, as can others. The same is true
compared to both of these systems for a second variant in which the entirety of the fuzzy AI is encompassed by
a single 10-input, 4-output FIS. While the performance ceiling of the system shown in Figure 9 is the same, or
higher, as the other variants, the anticipated performance through the same RL process is significantly worse
due to an extremely large fuzzy rule-base.
While the original system utilizes a total of 150 fuzzy rules, the single-FIS variant would have 4 ∗ 5 or
10