
Page 18 - Read Online
P. 18
Page 13 de Silva. Intell Robot 2021;1(1):3-17 https://dx.doi.org/10.20517/ir.2021.01
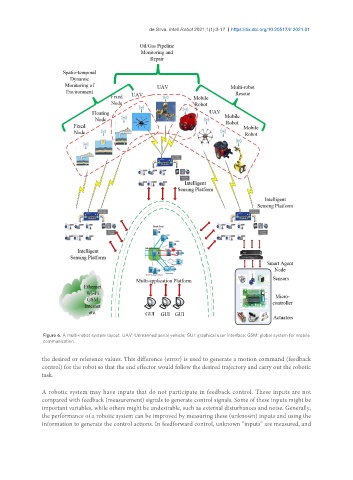
Figure 6. A multi-robot system layout. UAV: Unmanned aerial vehicle; GUI: graphical user interface; GSM: global system for mobile
communication.
the desired or reference values. This difference (error) is used to generate a motion command (feedback
control) for the robot so that the end effector would follow the desired trajectory and carry out the robotic
task.
A robotic system may have inputs that do not participate in feedback control. These inputs are not
compared with feedback (measurement) signals to generate control signals. Some of these inputs might be
important variables, while others might be undesirable, such as external disturbances and noise. Generally,
the performance of a robotic system can be improved by measuring these (unknown) inputs and using the
information to generate the control actions. In feedforward control, unknown “inputs” are measured, and